Gần đây khi làm việc với Aegisub và các công cụ karaoke, tôi nhận thấy việc tạo ra các hiệu ứng phức tạp liên quan đến hình học không đơn giản.
Ví dụ nếu muốn tạo hiệu ứng vỡ chữ sang các mảnh tam giác, ta cần đến thuật toán Jarviss hoặc Graham và Delauney. Trong đó:
- Jarviss hoặc Graham: Dùng để tìm ra convex hull - bao lồi - là hình bao ngoài chứa tất cả các điểm đầu vào.
- Delauney: Thuật toán chia convex hull thành các mảnh tam giác sao cho không có tam giác nào chồng lên nhau.
Thuật toán Jarviss
%3Bborder%3A1px%20solid%20%23aaaa33%3Bborder-radius%3A2px%3Bpointer-events%3Anone%3Bz-index%3A100%3B%7D%23mermaid-1706767502791%20%3Aroot%7B--mermaid-font-family%3A%22trebuchet%20ms%22%2Cverdana%2Carial%2Csans-serif%3B%7D%3C%2Fstyle%3E%3Cg%3E%3Cg%20class%3D%22output%22%3E%3Cg%20class%3D%22clusters%22%3E%3C%2Fg%3E%3Cg%20class%3D%22edgePaths%22%3E%3Cg%20class%3D%22edgePath%20LS-A%20LE-B%22%20id%3D%22L-A-B%22%20style%3D%22opacity%3A%201%3B%22%3E%3Cpath%20class%3D%22path%22%20d%3D%22M38.671875%2C71L42.838541666666664%2C71C47.005208333333336%2C71%2C55.338541666666664%2C71%2C63.671875%2C71C72.00520833333333%2C71%2C80.33854166666667%2C71%2C84.50520833333333%2C71L88.671875%2C71%22%20marker-end%3D%22url(%23arrowhead15)%22%20style%3D%22fill%3Anone%22%3E%3C%2Fpath%3E%3Cdefs%3E%3Cmarker%20id%3D%22arrowhead15%22%20viewBox%3D%220%200%2010%2010%22%20refX%3D%229%22%20refY%3D%225%22%20markerUnits%3D%22strokeWidth%22%20markerWidth%3D%228%22%20markerHeight%3D%226%22%20orient%3D%22auto%22%3E%3Cpath%20d%3D%22M%200%200%20L%2010%205%20L%200%2010%20z%22%20class%3D%22arrowheadPath%22%20style%3D%22stroke-width%3A%201%3B%20stroke-dasharray%3A%201%2C%200%3B%22%3E%3C%2Fpath%3E%3C%2Fmarker%3E%3C%2Fdefs%3E%3C%2Fg%3E%3Cg%20class%3D%22edgePath%20LS-B%20LE-C%22%20id%3D%22L-B-C%22%20style%3D%22opacity%3A%201%3B%22%3E%3Cpath%20class%3D%22path%22%20d%3D%22M119.34375%2C63.19553627902774L131.19791666666666%2C57.162946899189784C143.05208333333334%2C51.13035751935183%2C166.76041666666666%2C39.065178759675916%2C190.46875%2C33.03258937983796C214.17708333333334%2C27%2C237.88541666666666%2C27%2C249.73958333333334%2C27L261.59375%2C27%22%20marker-end%3D%22url(%23arrowhead16)%22%20style%3D%22fill%3Anone%22%3E%3C%2Fpath%3E%3Cdefs%3E%3Cmarker%20id%3D%22arrowhead16%22%20viewBox%3D%220%200%2010%2010%22%20refX%3D%229%22%20refY%3D%225%22%20markerUnits%3D%22strokeWidth%22%20markerWidth%3D%228%22%20markerHeight%3D%226%22%20orient%3D%22auto%22%3E%3Cpath%20d%3D%22M%200%200%20L%2010%205%20L%200%2010%20z%22%20class%3D%22arrowheadPath%22%20style%3D%22stroke-width%3A%201%3B%20stroke-dasharray%3A%201%2C%200%3B%22%3E%3C%2Fpath%3E%3C%2Fmarker%3E%3C%2Fdefs%3E%3C%2Fg%3E%3Cg%20class%3D%22edgePath%20LS-B%20LE-D%22%20id%3D%22L-B-D%22%20style%3D%22opacity%3A%201%3B%22%3E%3Cpath%20class%3D%22path%22%20d%3D%22M119.34375%2C78.80446372097227L131.19791666666666%2C84.83705310081022C143.05208333333334%2C90.86964248064817%2C166.76041666666666%2C102.93482124032408%2C190.46875%2C108.96741062016206C214.17708333333334%2C115%2C237.88541666666666%2C115%2C249.73958333333334%2C115L261.59375%2C115%22%20marker-end%3D%22url(%23arrowhead17)%22%20style%3D%22fill%3Anone%22%3E%3C%2Fpath%3E%3Cdefs%3E%3Cmarker%20id%3D%22arrowhead17%22%20viewBox%3D%220%200%2010%2010%22%20refX%3D%229%22%20refY%3D%225%22%20markerUnits%3D%22strokeWidth%22%20markerWidth%3D%228%22%20markerHeight%3D%226%22%20orient%3D%22auto%22%3E%3Cpath%20d%3D%22M%200%200%20L%2010%205%20L%200%2010%20z%22%20class%3D%22arrowheadPath%22%20style%3D%22stroke-width%3A%201%3B%20stroke-dasharray%3A%201%2C%200%3B%22%3E%3C%2Fpath%3E%3C%2Fmarker%3E%3C%2Fdefs%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22edgeLabels%22%3E%3Cg%20class%3D%22edgeLabel%22%20transform%3D%22%22%20style%3D%22opacity%3A%201%3B%22%3E%3Cg%20transform%3D%22translate(0%2C0)%22%20class%3D%22label%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20width%3D%220%22%20height%3D%220%22%3E%3C%2Frect%3E%3CforeignObject%20width%3D%220%22%20height%3D%220%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3E%3Cspan%20id%3D%22L-L-A-B%22%20class%3D%22edgeLabel%20L-LS-A'%20L-LE-B%22%3E%3C%2Fspan%3E%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22edgeLabel%22%20transform%3D%22translate(190.46875%2C27)%22%20style%3D%22opacity%3A%201%3B%22%3E%3Cg%20transform%3D%22translate(-46.125%2C-9.5)%22%20class%3D%22label%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20width%3D%2292.25%22%20height%3D%2219%22%3E%3C%2Frect%3E%3CforeignObject%20width%3D%2292.25%22%20height%3D%2219%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3E%3Cspan%20id%3D%22L-L-B-C%22%20class%3D%22edgeLabel%20L-LS-B'%20L-LE-C%22%3ENg%C6%B0%E1%BB%A3c%20chi%E1%BB%81u%3C%2Fspan%3E%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22edgeLabel%22%20transform%3D%22translate(190.46875%2C115)%22%20style%3D%22opacity%3A%201%3B%22%3E%3Cg%20transform%3D%22translate(-45.1328125%2C-9.5)%22%20class%3D%22label%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20width%3D%2290.265625%22%20height%3D%2219%22%3E%3C%2Frect%3E%3CforeignObject%20width%3D%2290.265625%22%20height%3D%2219%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3E%3Cspan%20id%3D%22L-L-B-D%22%20class%3D%22edgeLabel%20L-LS-B'%20L-LE-D%22%3EThu%E1%BA%ADn%20chi%E1%BB%81u%3C%2Fspan%3E%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22nodes%22%3E%3Cg%20class%3D%22node%20default%22%20id%3D%22flowchart-A-6%22%20transform%3D%22translate(23.3359375%2C71)%22%20style%3D%22opacity%3A%201%3B%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20x%3D%22-15.3359375%22%20y%3D%22-19%22%20width%3D%2230.671875%22%20height%3D%2238%22%20class%3D%22label-container%22%3E%3C%2Frect%3E%3Cg%20class%3D%22label%22%20transform%3D%22translate(0%2C0)%22%3E%3Cg%20transform%3D%22translate(-5.3359375%2C-9)%22%3E%3CforeignObject%20width%3D%2210.671875%22%20height%3D%2218%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3EA%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22node%20default%22%20id%3D%22flowchart-B-7%22%20transform%3D%22translate(104.0078125%2C71)%22%20style%3D%22opacity%3A%201%3B%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20x%3D%22-15.3359375%22%20y%3D%22-19%22%20width%3D%2230.671875%22%20height%3D%2238%22%20class%3D%22label-container%22%3E%3C%2Frect%3E%3Cg%20class%3D%22label%22%20transform%3D%22translate(0%2C0)%22%3E%3Cg%20transform%3D%22translate(-5.3359375%2C-9)%22%3E%3CforeignObject%20width%3D%2210.671875%22%20height%3D%2218%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3EB%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22node%20default%22%20id%3D%22flowchart-C-9%22%20transform%3D%22translate(277.375%2C27)%22%20style%3D%22opacity%3A%201%3B%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20x%3D%22-15.78125%22%20y%3D%22-19%22%20width%3D%2231.5625%22%20height%3D%2238%22%20class%3D%22label-container%22%3E%3C%2Frect%3E%3Cg%20class%3D%22label%22%20transform%3D%22translate(0%2C0)%22%3E%3Cg%20transform%3D%22translate(-5.78125%2C-9)%22%3E%3CforeignObject%20width%3D%2211.5625%22%20height%3D%2218%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3EC%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3Cg%20class%3D%22node%20default%22%20id%3D%22flowchart-D-11%22%20transform%3D%22translate(277.375%2C115)%22%20style%3D%22opacity%3A%201%3B%22%3E%3Crect%20rx%3D%220%22%20ry%3D%220%22%20x%3D%22-15.78125%22%20y%3D%22-19%22%20width%3D%2231.5625%22%20height%3D%2238%22%20class%3D%22label-container%22%3E%3C%2Frect%3E%3Cg%20class%3D%22label%22%20transform%3D%22translate(0%2C0)%22%3E%3Cg%20transform%3D%22translate(-5.78125%2C-9)%22%3E%3CforeignObject%20width%3D%2211.5625%22%20height%3D%2218%22%3E%3Cdiv%20xmlns%3D%22http%3A%2F%2Fwww.w3.org%2F1999%2Fxhtml%22%20style%3D%22display%3A%20inline-block%3B%20white-space%3A%20nowrap%3B%22%3ED%3C%2Fdiv%3E%3C%2FforeignObject%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fg%3E%3C%2Fsvg%3E "Diagram generated via mermaid")
Thuật toán Jarvis hay còn gọi là thuật toán chiều kim đồng hồ. Ý tưởng:
- Ta bắt đầu từ điểm bên trái nhất (điểm có tọa độ
xnhỏ nhất). - Từ điểm
xnày ta sẽ tiến hành "bao" các điểm còn lại theo hướng ngược chiều kim đồng hồ.
Vậy câu hỏi là, làm sao xác định được điểm tiếp theo? Câu trả lời là xét hướng.
Xác định hướng của 3 điểm (clockwise)
Có 3 điểm nằm trên mặt phẳng tọa độ. Hướng quay của 3 điểm có thể là:
- Ngược chiều kim đồng hồ (counterclockwise).
- Thuận chiều kim đồng hồ (clockwise).
- Thẳng góc (3 điểm nằm trên một đường thẳng - collinear).
Ta có sơ đồ sau:
- Nếu chiều của (p1, p2, p3) là thẳng góc thì chiều của (p3, p2, p1) cũng thẳng góc.
- Nếu chiều của (p1, p2, p3) thuận kim đồng hồ, thì chiều của (p3, p2, p1) ngược kim đồng hồ và điều ngược lại cũng đúng.
Ví dụ:
Đầu vào: p1 = {0, 0}, p2 = {4, 4}, p3 = {1, 2}
Đầu ra: CounterClockWise
Đầu vào: p1 = {0, 0}, p2 = {4, 4}, p3 = {1, 1}
Đầu ra: Colinear
Làm sao để tính? Ý tưởng là tính ra độ dốc:
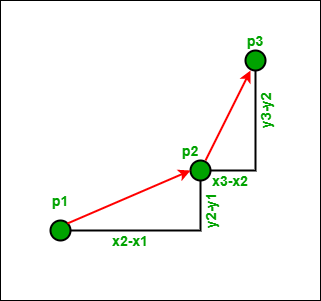
Độ dốc của 2 điểm (p1, p2): σ = (y2 - y1)/(x2 - x1) Độ dốc của 2 điểm (p2, p3): τ = (y3 - y2)/(x3 - x2)
Nếu σ > τ, hướng sẽ là thuận kim đồng hồ (quay phải).
Sử dụng các giá trị σ và τ trên, ta kết luận: Hướng của 3 điểm phụ thuộc vào dấu của biểu thức sau:
(y2 - y1)*(x3 - x2) - (y3 - y2)*(x2 - x1)
Nếu giá trị trả về của biểu thức trên là âm thì tức là ngược chiều kim đồng hồ.
Code thuật toán:
- Java
- Python
class Point {
int x, y;
Point(int x, int y) {
this.x = x;
this.y = y;
}
}
class Clocker {
// Để tìm ra hướng của 3 điểm
// (p1, p2, p3). Hàm này trả về
// các giá trị sau:
// 0 --> p, q và r thẳng hàng
// 1 --> Thuận kim đồng hồ
// 2 --> Ngược kim đồng hồ
public static int orientation(Point p1, Point p2,
Point p3) {
int val = (p2.y - p1.y) * (p3.x - p2.x) -
(p2.x - p1.x) * (p3.y - p2.y);
if (val == 0) return 0; // thẳng hàng
return (val > 0) ? 1 : 2;
}
public static void main(String[] args) {
Point p1 = new Point(0, 0);
Point p2 = new Point(4, 4);
Point p3 = new Point(1, 2);
int o = orientation(p1, p2, p3);
if (o == 0)
System.out.print("Linear");
else if (o == 1)
System.out.print("Clockwise");
else
System.out.print("CounterClockwise");
}
}
class Point:
def __init__(self, x, y):
self.x = x
self.y = y
def orientation(p1, p2, p3):
val = (float(p2.y - p1.y) * (p3.x - p2.x)) - (float(p2.x - p1.x) * (p3.y - p2.y))
if (val > 0):
# Thuận
return 1
elif (val < 0):
# Ngược
return 2
else:
# Thẳng hàng
return 0
p1 = Point(0, 0)
p2 = Point(4, 4)
p3 = Point(1, 2)
o = orientation(p1, p2, p3)
if (o == 0):
print("Linear")
elif (o == 1):
print("Clockwise")
else:
print("CounterClockwise")
Đọc đến đây thì ta gọi chút nhé:
p: Điểm đã xác định là nằm trong convex hull. Coiqlà tâm đồng hồ.q: Là điểm tiếp theo sao cho bộ ba(p, q, r)vớirlà điểm bất kì nào khác trong bộ điểm đầu vào.
Với thuật toán này thì ta có:
- Độ phức tạp theo thời gian: O(1)
- Auxiliary Space O(1)
Các bước tiếp theo:
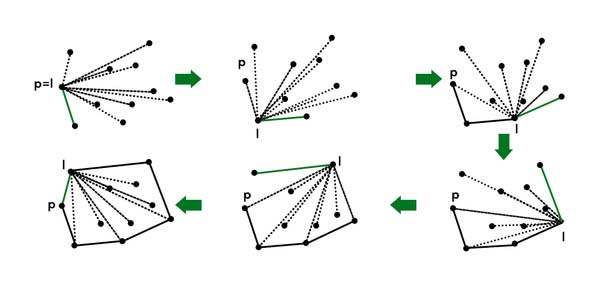
- Để tìm ra
q, ta lấyqlàm điểm tiếp theo, sau đó duyệt qua tất cả các điểm. Với điểmibất kì, nếuingược chiều kim đồng hồ hơn (tính theo giá trị góc), ví dụ: orientation(p, i, q) là ngược chiều kim đồng hồ, thì ta gán q thành i. Kết quảqcuối cùng sẽ là điểm ban đầu (tứcp). next[p] = q(Đặtqlàm điểm tiếp theo củapđể xét tiếp).p = q(Đặtpthànhqcho lần duyệt tiếp).
Dưới đây là code của thuật toán trên:
- C++
- Java
- Python
#include <bits/stdc++.h>
using namespace std;
struct Point
{
int x, y;
};
int orientation(Point p, Point q, Point r)
{
int val = (q.y - p.y) * (r.x - q.x) -
(q.x - p.x) * (r.y - q.y);
if (val == 0) return 0;
return (val > 0)? 1: 2;
}
void convexHull(Point points[], int n)
{
if (n < 3) return;
vector<Point> hull;
// Tìm điểm tận cùng bên trái
int l = 0;
for (int i = 1; i < n; i++)
if (points[i].x < points[l].x)
l = i;
int p = l, q;
do
{
hull.push_back(points[p]);
q = (p+1)%n;
for (int i = 0; i < n; i++)
{
if (orientation(points[p], points[i], points[q]) == 2)
q = i;
}
p = q;
} while (p != l);
for (int i = 0; i < hull.size(); i++)
cout << "(" << hull[i].x << ", "
<< hull[i].y << ")\n";
}
int main()
{
Point points[] = {{0, 3}, {2, 2}, {1, 1}, {2, 1},
{3, 0}, {0, 0}, {3, 3}};
int n = sizeof(points)/sizeof(points[0]);
convexHull(points, n);
return 0;
}
import java.util.*;
class Point
{
int x, y;
Point(int x, int y){
this.x=x;
this.y=y;
}
}
class GFG {
public static int orientation(Point p, Point q, Point r)
{
int val = (q.y - p.y) * (r.x - q.x) -
(q.x - p.x) * (r.y - q.y);
if (val == 0) return 0;
return (val > 0)? 1: 2;
}
public static void convexHull(Point points[], int n)
{
if (n < 3) return;
Vector<Point> hull = new Vector<Point>();
int l = 0;
for (int i = 1; i < n; i++)
if (points[i].x < points[l].x)
l = i;
int p = l, q;
do
{
hull.add(points[p]);
q = (p + 1) % n;
for (int i = 0; i < n; i++)
{
if (orientation(points[p], points[i], points[q])
== 2)
q = i;
}
p = q;
} while (p != l);
for (Point temp : hull)
System.out.println("(" + temp.x + ", " +
temp.y + ")");
}
public static void main(String[] args)
{
Point points[] = new Point[7];
points[0]=new Point(0, 3);
points[1]=new Point(2, 3);
points[2]=new Point(1, 1);
points[3]=new Point(2, 1);
points[4]=new Point(3, 0);
points[5]=new Point(0, 0);
points[6]=new Point(3, 3);
int n = points.length;
convexHull(points, n);
}
}
class Point:
def __init__(self, x, y):
self.x = x
self.y = y
def Left_index(points):
minn = 0
for i in range(1,len(points)):
if points[i].x < points[minn].x:
minn = i
elif points[i].x == points[minn].x:
if points[i].y > points[minn].y:
minn = i
return minn
def orientation(p, q, r):
if val == 0:
return 0
elif val > 0:
return 1
else:
return 2
def convexHull(points, n):
if n < 3:
return
l = Left_index(points)
hull = []
p = l
q = 0
while(True):
hull.append(p)
q = (p + 1) % n
for i in range(n):
if(orientation(points[p],
points[i], points[q]) == 2):
q = i
p = q
if(p == l):
break
for each in hull:
print(points[each].x, points[each].y)
points = []
points.append(Point(0, 3))
points.append(Point(2, 2))
points.append(Point(1, 1))
points.append(Point(2, 1))
points.append(Point(3, 0))
points.append(Point(0, 0))
points.append(Point(3, 3))
convexHull(points, len(points))
Đầu ra: tập các điểm liên kết tạo thành Convex Hull:
(0, 3)
(0, 0)
(3, 0)
(3, 3)
Độ phức tạp tời gian: O(m * n), với n là số điểm đầu vào và m là số đầu ra (hay các điểm tạo thân), và m <= n. Với mỗi điểm m, ta xét tất cả các điểm khác để biết vị trí tiếp theo.
Worst case theo độ phức tạp thời gian: O(n2). Xảy ra khi tất cả các điểm đều nằm trên bao lồi (m = n).
Auxiliary Space: O(n), do n không gian phụ trợ đã được lấp đầy.
Lưu ý: Các đoạn code trên sẽ cho ra các kết quả khác nhau với các đầu vào có thứ tự khác nhau, nếu như có các điểm thẳng hàng trên bao lồi. Ví dụ:
Đầu vào:
(0, 3), (0, 0), (0, 1), (3, 0), (3, 3)
sẽ cho ra:
(0, 3) (0, 0) (3, 0) (3, 3)
một ví dụ khác, đầu vào:
(0, 3), (0, 1), (0, 0), (3, 0), (3, 3)
sẽ cho ra:
(0, 3) (0, 1) (0, 0) (3, 0) (3, 3)
Nguồn tham khảo:
http://www.cs.uiuc.edu/~jeffe/teaching/373/notes/x05-convexhull.pdf http://www.dcs.gla.ac.uk/~pat/52233/slides/Hull1x1.pdf